Super-Accurate
10x more accurate than UWB.
100x more accurate than BLE/WiFi
Inexpensive
Less expensive than alternatives and more precise at the same time
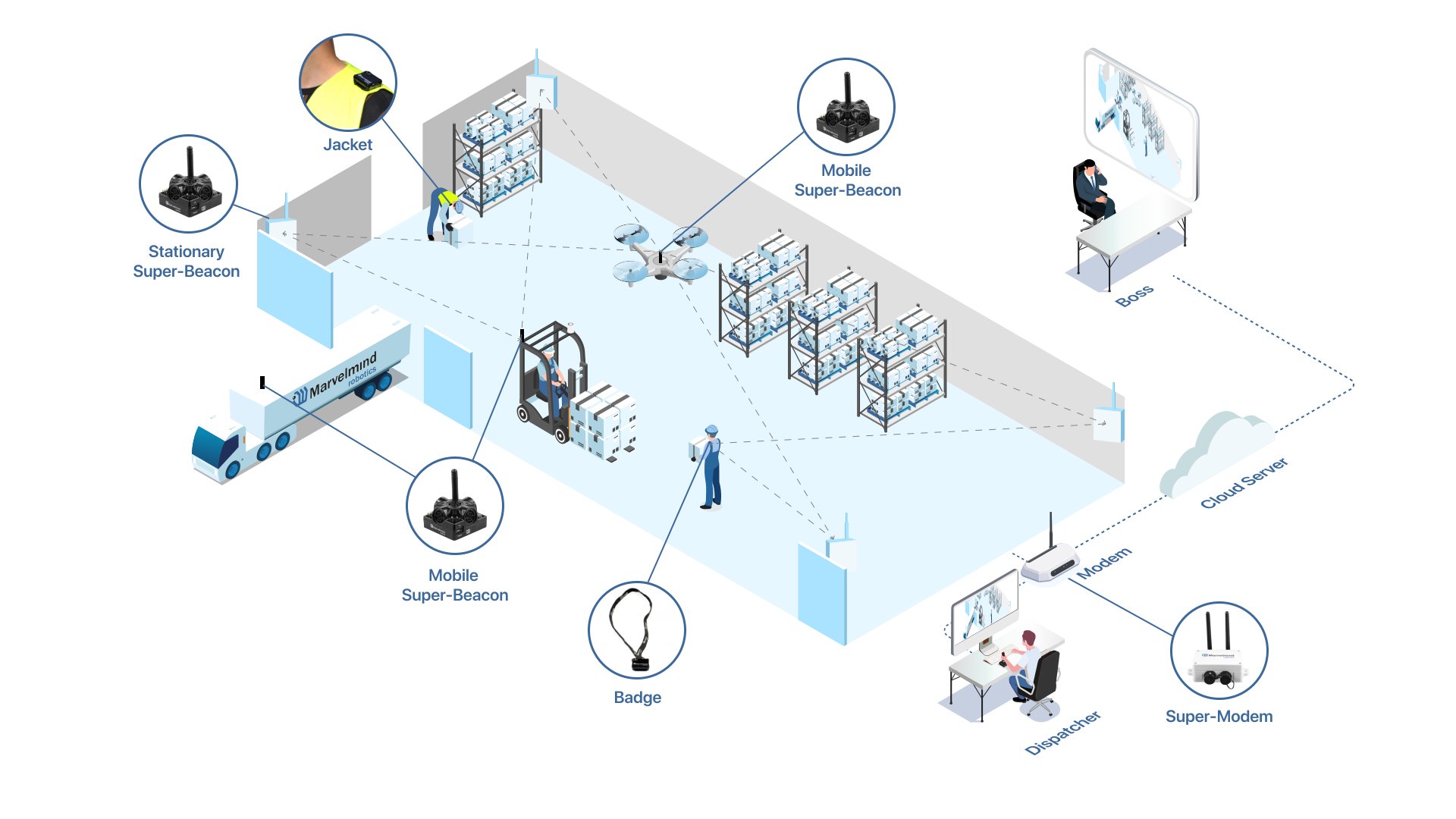
Versatile
Precise RTLS for various applications: autonomous robotics, vehicles, drones, manufacturing, logistics, safety. Works indoor and outdoor
Easy to deploy
Basic configurations can be deployed in 5 minutes
Scalable
250 beacons/tags supported today, covering 20,000m2 and more.
Thousands beacons/tags supported with Multi-modem architecture
Flexible
Suitable for large-scale industrial applications and university projects
Quick delivery
The same or next day shipment for the majority of products with 3-5 days delivery worldwide via DHL/FedEx/UPS.
Support
Various support channels from online chat to full managed services